|
Bluecontroller (BCA8-BTM)
Epsilon
Bluecontroller BCA8-BTM (bluetooth module BTM-222, microcontroller ATmega328P)
|
|
Bluecontroller (BCA8-BTM)
Epsilon
Bluecontroller BCA8-BTM (bluetooth module BTM-222, microcontroller ATmega328P)
|
#include "cmd.h"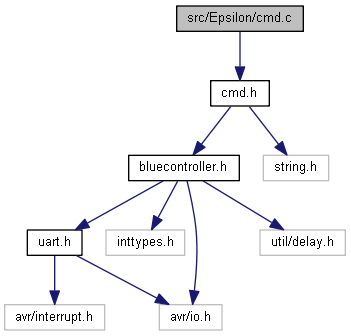
Functions | |
| void | checkCmd () |
| Check commands. More... | |
| ISR (USART_RX_vect) | |
| Interrupt USART_RX_vect. More... | |
Variables | |
| volatile char | uart_string [UART_MAXSTRLEN+1] = "" |
| volatile uint8_t | uart_str_complete = 0 |
| volatile uint8_t | uart_str_count = 0 |
Licence: CC BY 3.0 (http://creativecommons.org/licenses/by/3.0/)
Code: http://github.com/Xennis/Bluecontroller_BCA8_BTM
Documentation: http://xennis.org/wiki/Bluecontroller
| void checkCmd | ( | void | ) |
Check commands.
This method checks if received command is a valid command and react to it. Furthermore it resets the commandBuffer.
| ISR | ( | USART_RX_vect | ) |
Interrupt USART_RX_vect.
This interrupt is fired if new data is available in USART receive buffer.
Source: http://www.mikrocontroller.net/articles/AVR-GCC-Tutorial/Der_UART
 1.8.3.1
1.8.3.1 
